WARNING: To drag this element, first rotate the view so that the horizontal plane is clearly visible.
旋转到水平面上再shift+左键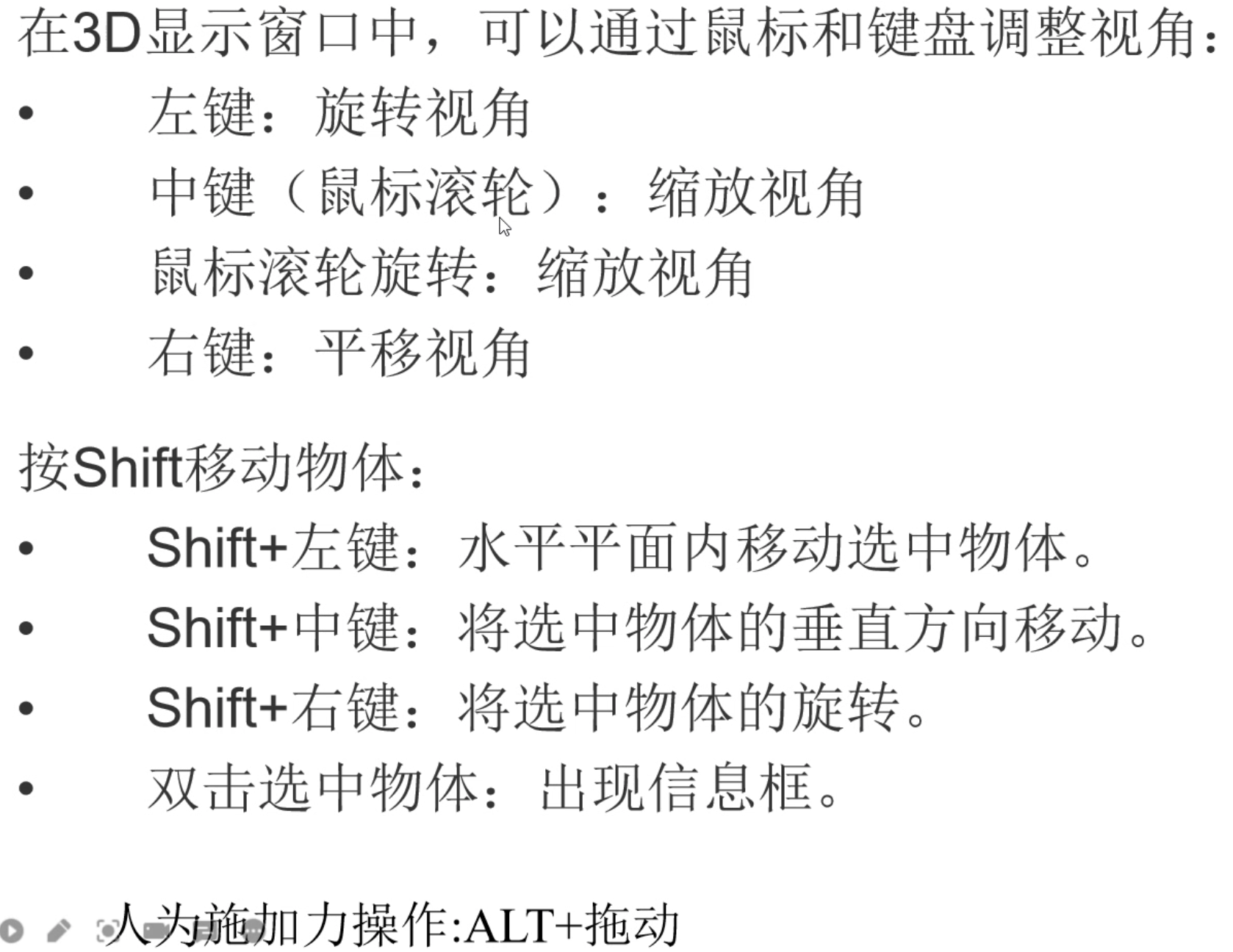
右键平移
保存:Ctrl shift s
向导:
1.新建项目目录向导(新建场景)
2.新建机器人控制器向导(新建控制器)
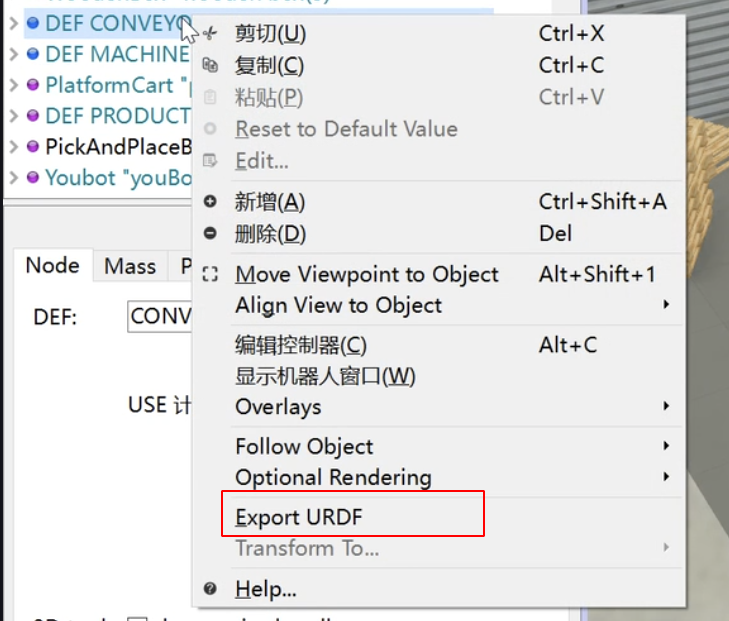
只有机器人节点才能导出urdf文件
转换完后的文件放到protos目录下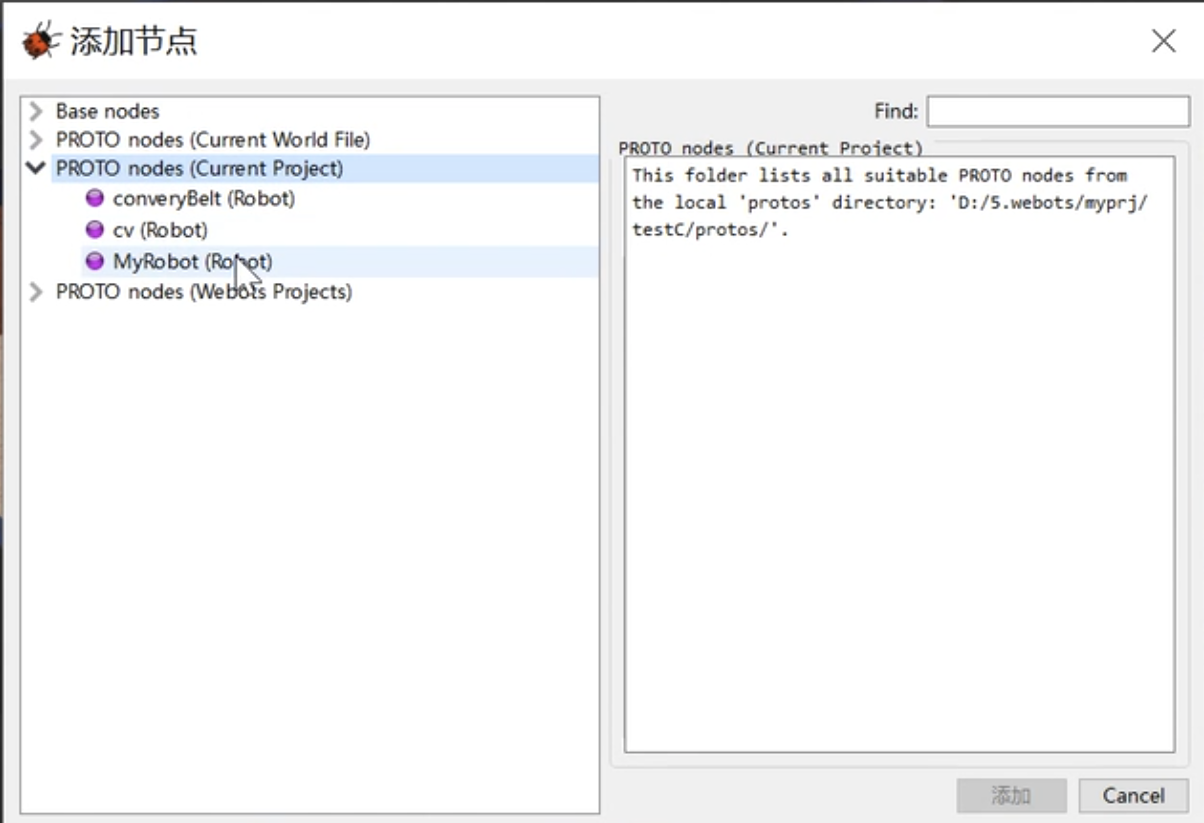
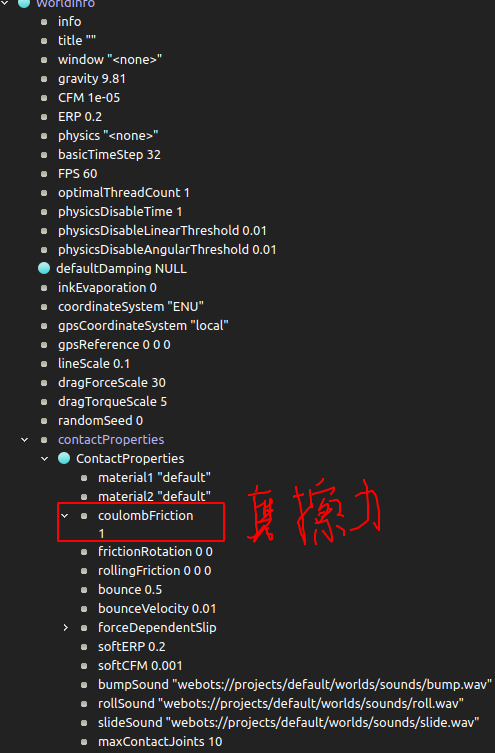
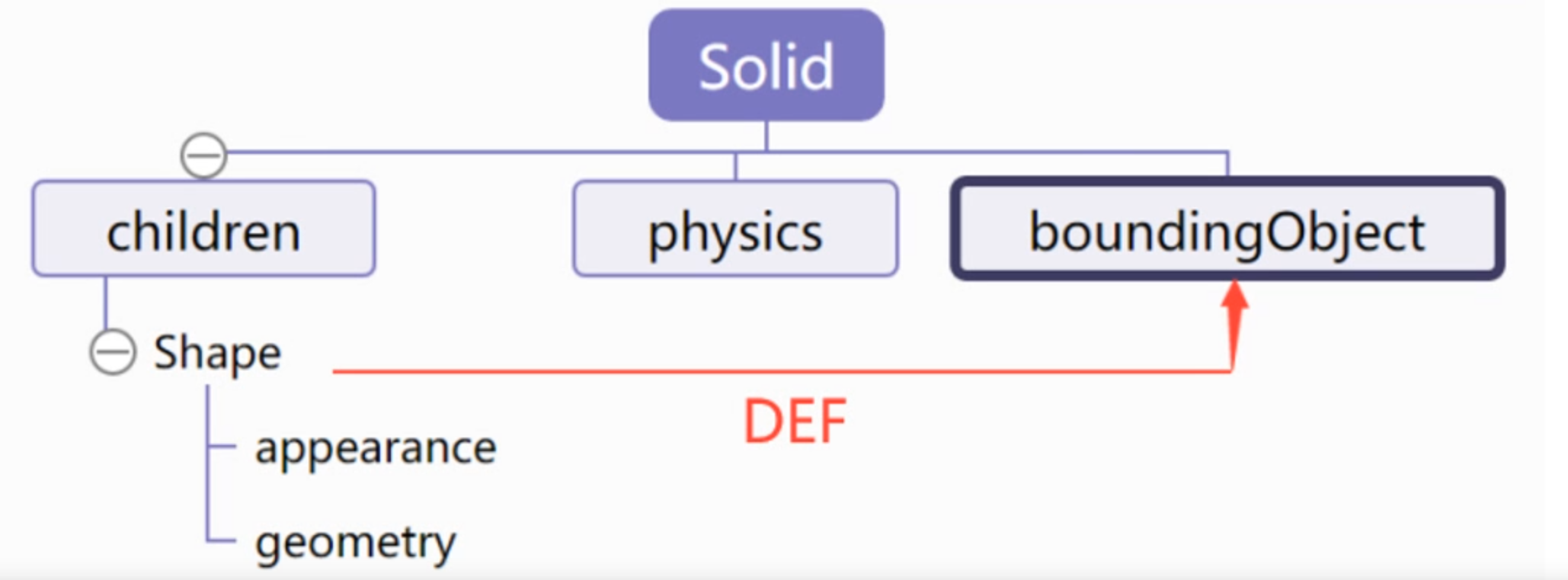
在 Webots 中,Solid 节点用于定义具有物理属性的物体,主要用于仿真中的动态交互。它包含了物理模拟所需的各种参数,如质量、摩擦力和弹性等。
在 Webots 中,Shape 节点用于定义物体的外观和几何形状。
Solid 节点通常与 Shape 节点结合使用,以创建既有外观又具物理特性的对象
- **形状 (Geometry)**:指的是物体的几何结构和形式,比如它是一个立方体、球体、圆柱体等。形状决定了物体在空间中的占用区域,以及与其他物体的交互和碰撞。
- **外观 (Appearance)**:指的是物体的视觉特征,如颜色、材质、纹理等。外观影响的是物体的视觉效果,而不是其物理结构。