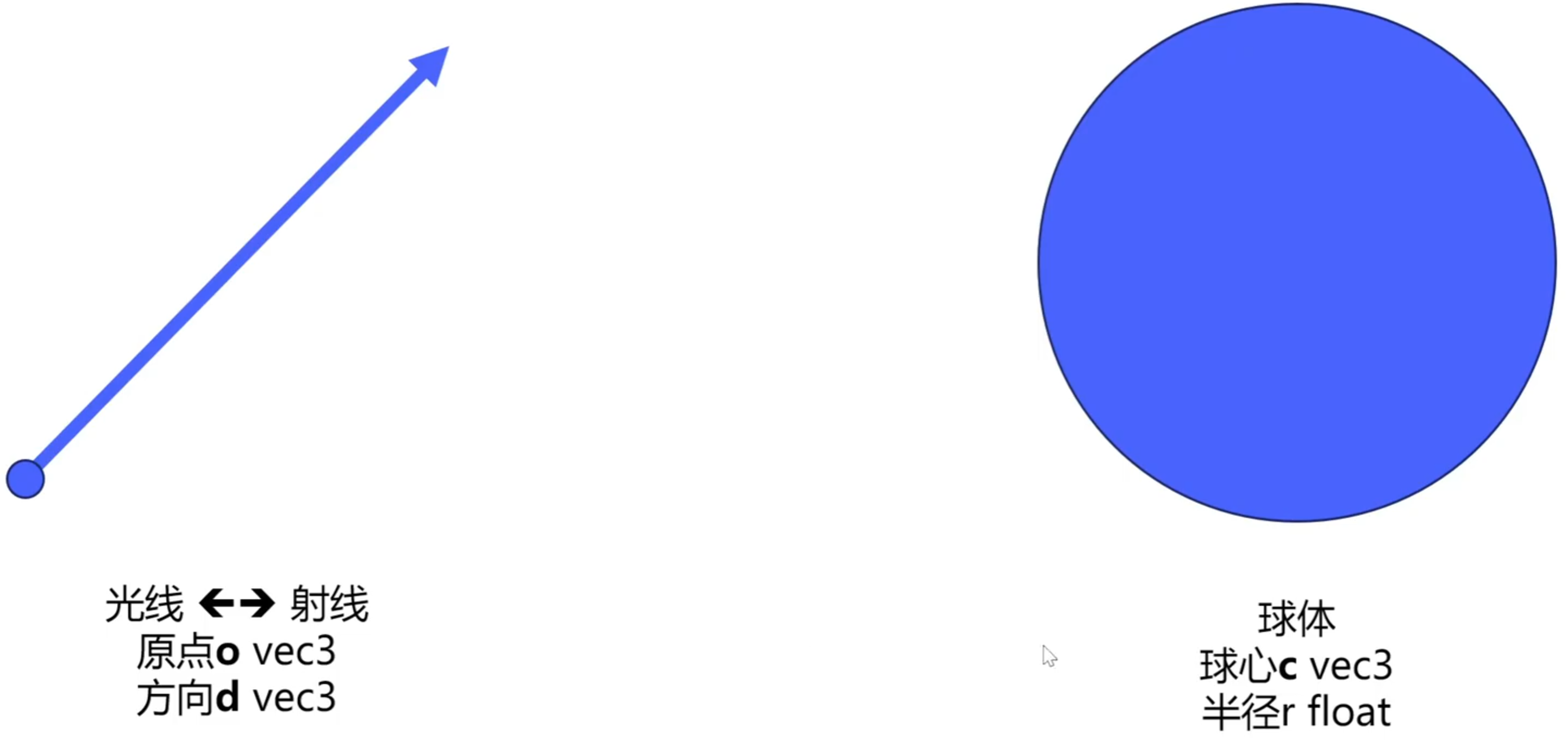
光线与球体的相交测试:
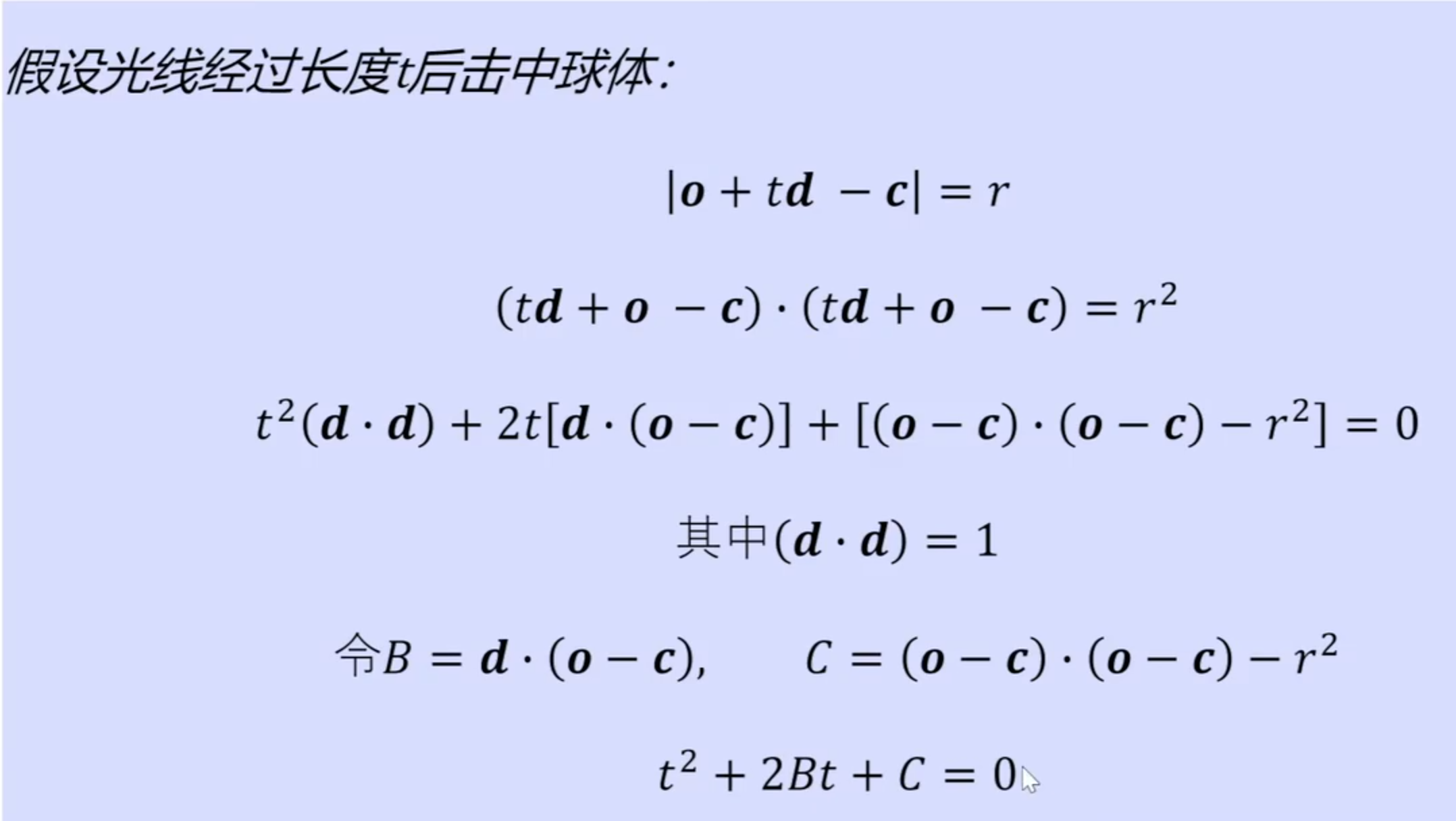
可以通过判断这个一元二次方程的delta判别式判断光线是否击中了球体
结构体:默认的成员访问权限是 public。
类:默认的成员访问权限是 private。
视口裁剪(Viewport Clipping)
视口裁剪是指在渲染过程中,图形系统根据当前的视口(viewport)大小和位置,裁剪出只在视口内的部分。这通常发生在将三维场景转换为二维图像时。
- 视口定义:视口是指在窗口或屏幕上的一个矩形区域,图形渲染的结果只显示在这个区域内。
- 用途:视口裁剪确保只绘制视口范围内的图形,避免无效的计算和渲染,提高效率。
透视裁剪(Perspective Clipping)
透视裁剪是指在透视投影过程中,决定哪些对象在视锥体内并且可见,从而只渲染可见部分。透视投影会产生一个视锥体,位于观察者与场景之间。
- 视锥体:在透视投影中,视锥体是一个从观察点(摄像机位置)向外扩展的锥形区域。只有位于这个区域内的对象才会被渲染。
- 裁剪:透视裁剪会去除视锥体外的对象,避免不必要的计算和渲染,并处理对象的深度关系。
总结
- 视口裁剪:关注的是最终图像在屏幕上的显示区域,只显示视口内的内容。
- 透视裁剪:关注的是三维场景中哪些对象在视锥体内,以决定哪些对象是可见的。
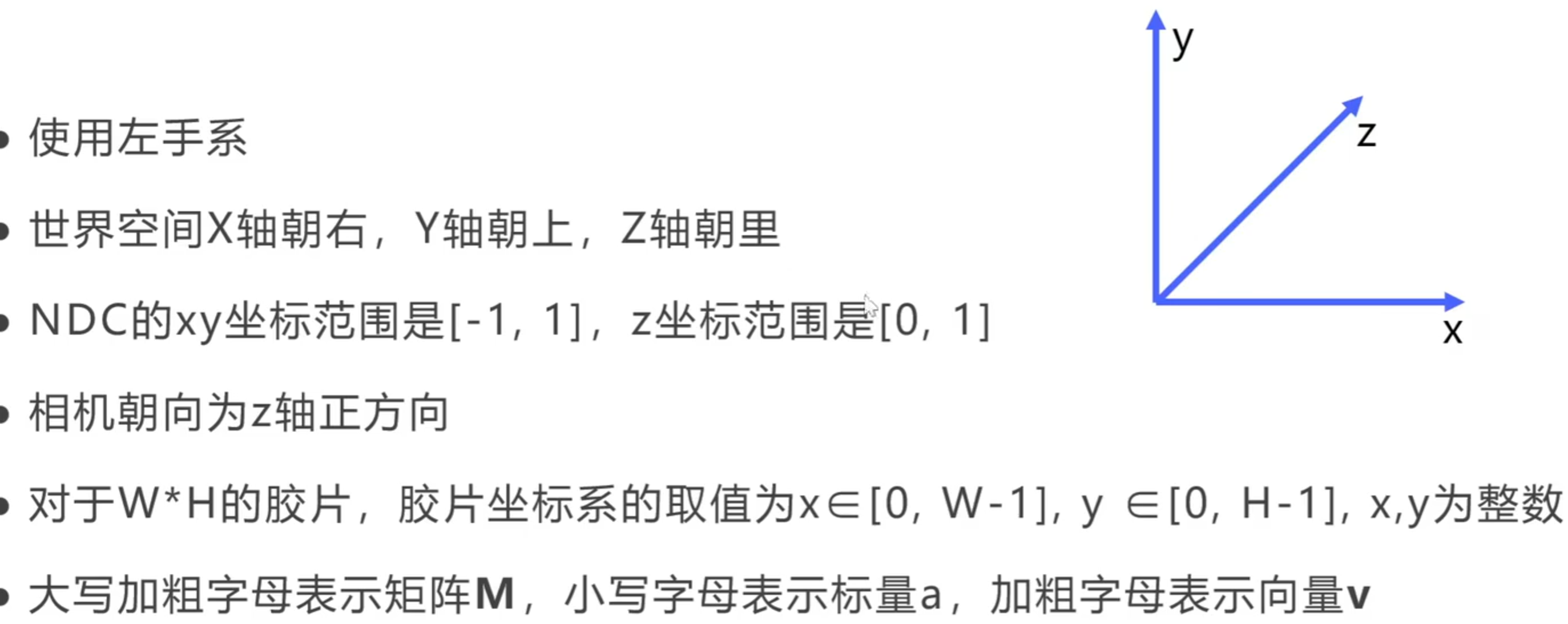
屏幕空间和 NDC(Normalized Device Coordinates)空间之间的关系:
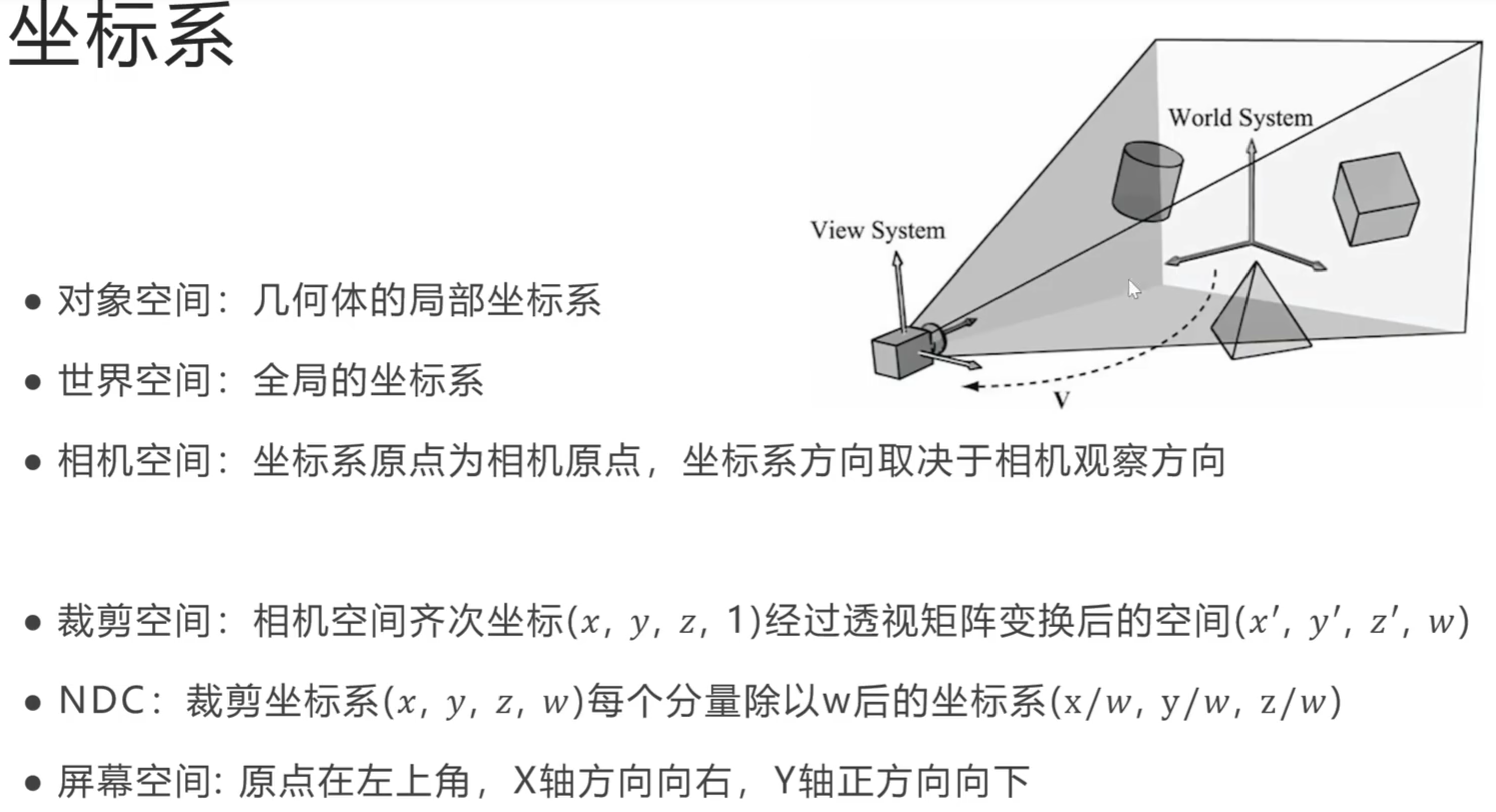
坐标变换流程
在图形渲染过程中,顶点坐标经历多个变换,从世界空间到最终的屏幕空间,这个过程大致包括:
- 模型变换:将顶点从局部模型坐标转换到世界坐标。
- 视图变换:将世界坐标转换到相机坐标(视图空间)。
- 投影变换:将相机坐标转换到裁剪空间。
- 裁剪:将不在视野范围内的顶点剔除。
- 透视除法:将裁剪空间的坐标转换到 NDC 空间。这个步骤涉及将每个坐标的 x、y 和 z 分别除以 w(齐次坐标),使得坐标范围归一化到 [-1, 1]。
NDC 到屏幕空间的转换
一旦顶点处于 NDC 空间,它们需要被转换到屏幕空间:
- 视口变换:将 NDC 坐标映射到实际的屏幕像素坐标。视口变换使用屏幕的分辨率来进行坐标的线性变换。具体步骤是:
- 将 NDC 的 x 和 y 坐标从 [-1, 1] 范围映射到屏幕像素的范围。例如,对于一个宽度为 W,高度为 H 的屏幕:
screenX = (ndcX + 1) * 0.5 * (W - 1)screenY = (1 - (ndcY + 1) * 0.5) * (H - 1)(Y 轴可能需要翻转,具体取决于坐标系统的定义)
- 将 NDC 的 x 和 y 坐标从 [-1, 1] 范围映射到屏幕像素的范围。例如,对于一个宽度为 W,高度为 H 的屏幕:
- NDC 空间 是一个归一化的坐标系统,主要用于在渲染管线中的处理,使得顶点坐标能够统一处理,不论目标显示设备的分辨率如何。
- 屏幕空间 是实际显示的坐标系统,与屏幕的物理尺寸和分辨率相关。
- 转换:通过视口变换,NDC 空间的坐标被转换为屏幕空间的像素坐标,从而最终呈现在用户的屏幕上。
NDC 空间可以看作是从三维世界到二维屏幕的中间步骤,而屏幕空间则是最终的输出结果。
虚函数(Virtual Function)
- 定义:虚函数是在基类中声明为
virtual的成员函数,可以在派生类中重写(override)。 - 实现:虚函数可以有具体的实现。基类中的虚函数可以提供默认的实现,派生类可以选择重写它。
- 对象创建:可以创建基类的对象,也可以创建派生类的对象。
纯虚函数(Pure Virtual Function)
- 定义:纯虚函数是在基类中声明为
virtual并且等于0的函数。语法是virtual void functionName() = 0;。 - 实现:纯虚函数没有实现,基类通常不可以实例化。
- 对象创建:不能直接创建类的对象(即抽象类),只能创建派生类的对象。
- 用途:用于定义接口,强制派生类实现特定的函数
输入流操作符 (>>) 在处理流时,会自动跳过空格和其他空白字符(如换行符和制表符),直到遇到下一个有意义的值为止。因此,空格在这一过程中并不会被显式处理。
line.compare(0, 2, "v ") 的含义:
- **
0**:表示从line字符串的第一个字符开始进行比较。 - **
2**:表示比较的长度为 2,也就是说,只比较line字符串的前两个字符。 - **
"v "**:表示要将line字符串的前两个字符与字符串"v "进行比较。 - 如果
line的前两个字符与"v "完全匹配,compare方法返回 0。 - 如果不匹配,返回一个非 0 的值(具体的值取决于比较的结果:如果
line字符串小于"v ",返回一个负数;如果line字符串大于"v ",返回一个正数)。
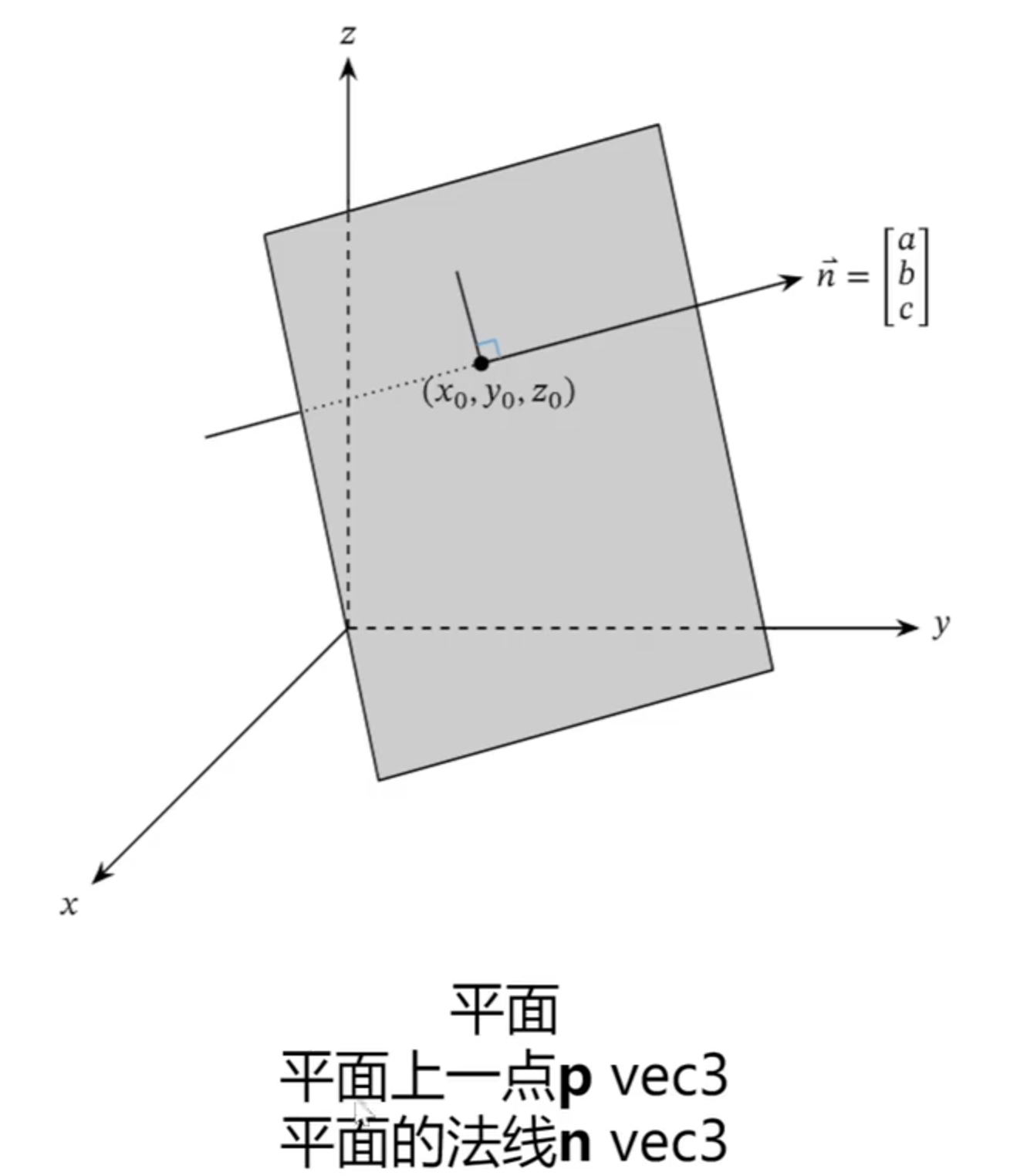
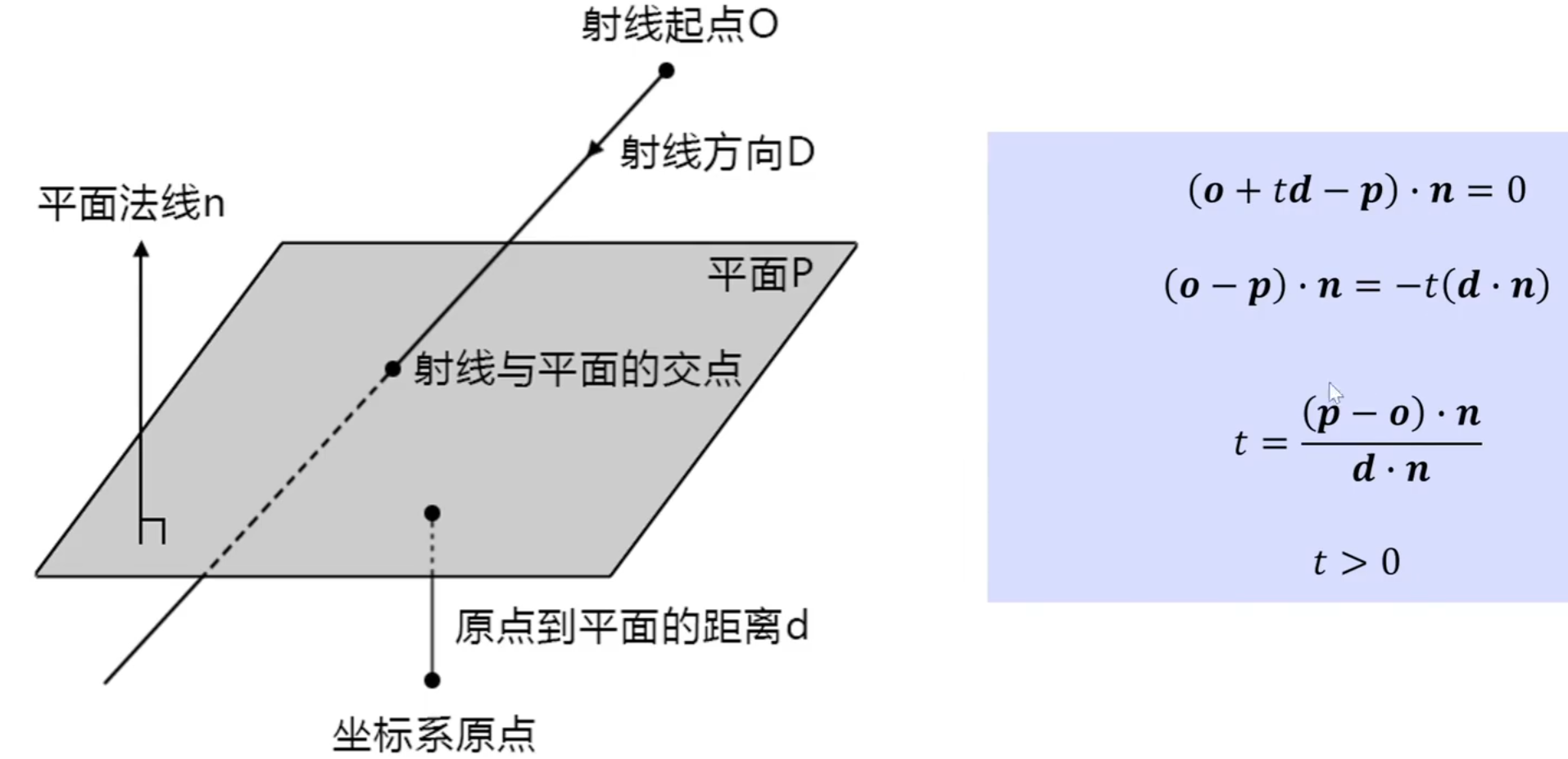
平面和场景
场景:管理世界空间下所有的形状(Shape)
平面的数学定义:
修改是为了改进多线程环境中的 线程安全性 和 竞态条件 的问题。我们来详细分析一下原始代码和修改后的代码之间的差异,以及为什么要这样修改。
原始代码:
count++;
if (count % film.getWidth() == 0) {
std::cout << static_cast<float>(count) / (film.getWidth() * film.getHeight()) << std::endl;
}
修改后的代码:
int n = ++count;
if (n % film.getWidth() == 0) {
std::cout << static_cast<float>(n) / (film.getWidth() * film.getHeight()) << std::endl;
}
问题分析:
1. count++ 是非原子操作
count++实际上是由 两个操作 组成的:读取count的值,然后 **增加count**。在多线程环境中,如果多个线程同时执行count++,就会发生 竞态条件(race condition),可能导致count的值增加不正确或者丢失。- 例如,如果线程 A 和线程 B 同时读取到相同的
count值,然后都加 1 写回,这样就会丢失一个递增的结果,导致count的值不准确。
2. ++count 是原子操作
++count是 自增并返回自增后的值,它在执行过程中是原子的,不会有并发冲突(前提是count本身是原子变量或操作)。这是因为它在自增的时候直接对count的值进行更新并返回,而不需要先读取再写入,避免了多个线程同时读取和写入的情况。
3. 存储递增结果到 n
- 修改后的代码
int n = ++count;将自增后的结果保存在n中。这样做的好处是:- 保证了
count更新后的值在后续代码中是确定的。如果我们直接在if (count % film.getWidth() == 0)中访问count,其他线程可能会在我们检查count时修改它,导致判断条件不稳定。而n是在更新后的值保存时就固定了,因此后续的判断和输出使用n可以确保一致性。 - 避免了
count被其他线程修改时的影响。虽然count本身是全局共享的,但通过把递增结果保存在n中,我们保证了n的值不会在后续代码执行时被其他线程改动,确保了输出的正确性。
- 保证了
线程安全与性能考虑:
- 使用
int n = ++count;的修改,确保了 每个线程对count的更新是安全的。同时,虽然++count在某些情况下可能是原子操作,但若count是一个普通变量,并且没有显式的线程同步机制,那么可能仍然存在隐性的问题。将更新后的count值保存到n可以减少这种不确定性。 - 在多线程环境下,避免直接在条件判断中使用共享变量(如
count)是一个常见的做法,尤其是当这个变量在多个线程中共享且没有其他同步机制时。通过中间变量n来持有更新后的值,避免了在count被其他线程修改时产生的竞态条件。
glm::translate(glm::mat4(1.f), pos) *
glm::rotate(glm::mat4(1.f), glm::radians(rotate.z), { 0, 0, 1 }) *
glm::rotate(glm::mat4(1.f), glm::radians(rotate.y), { 0, 1, 0 }) *
glm::rotate(glm::mat4(1.f), glm::radians(rotate.x), { 1, 0, 0 }) *
glm::scale(glm::mat4(1.f), scale)
glm::mat4(1.f):创建一个单位矩阵,表示没有任何变换。glm::translate(..., pos):将矩阵平移到pos指定的位置,pos是一个glm::vec3向量,表示物体在3D空间中的平移偏移量(x,y,z)。glm::radians(rotate.z):将角度rotate.z转换为弧度,因为GLM的rotate函数期望的旋转角度单位是弧度。{ 0, 0, 1 }:指定旋转轴为Z轴。glm::scale(glm::mat4(1.f), scale):执行一个缩放变换,其中scale是一个glm::vec3向量,表示沿着X、Y和Z轴的缩放比例。例如,scale = { 2.f, 3.f, 1.f }表示在X轴上放大2倍,在Y轴上放大3倍,而Z轴保持不变。
在GLM中,矩阵的乘法是从 右到左 进行的
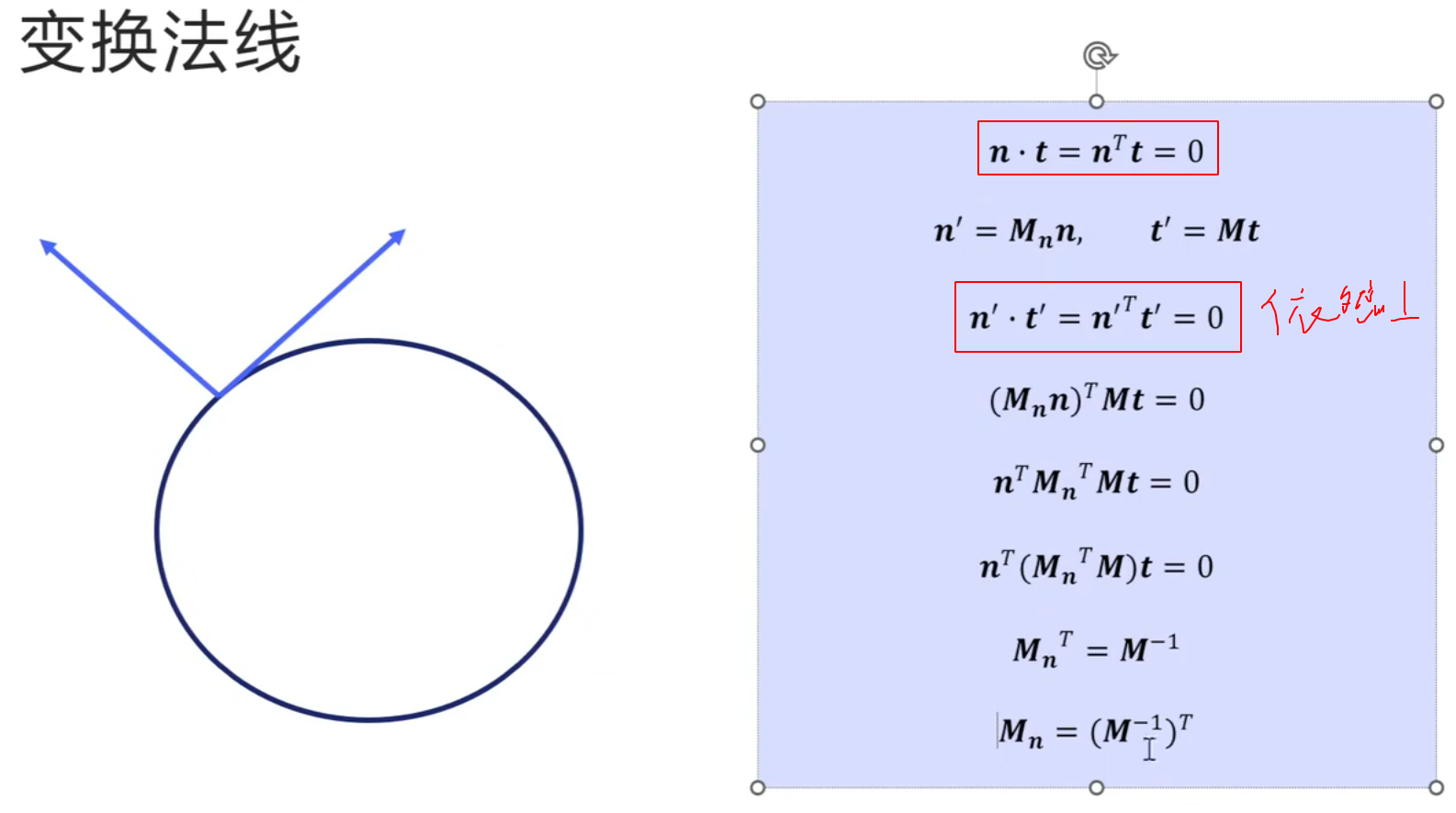

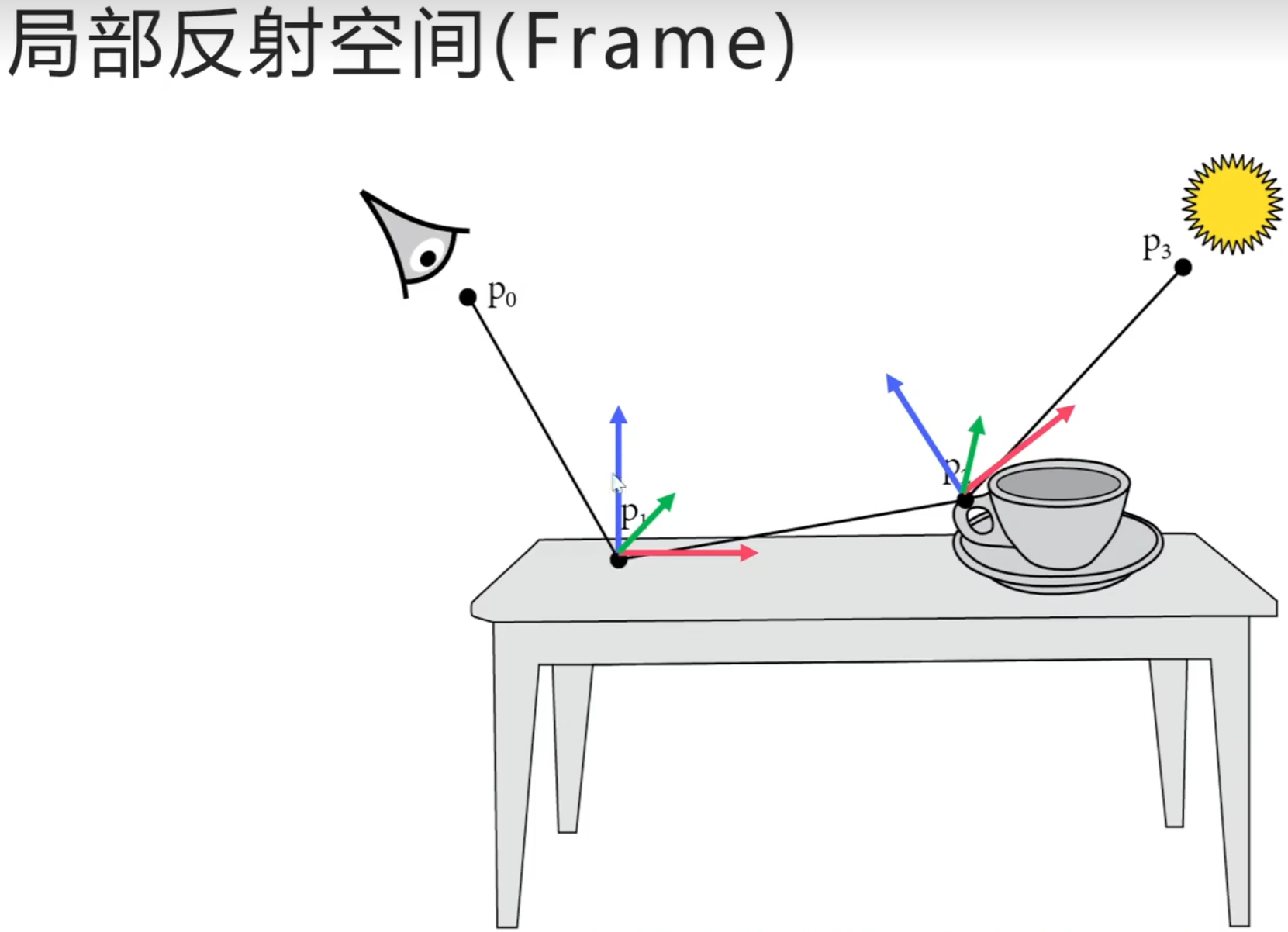
frame坐标系不用储存坐标系的原点,只用存储坐标轴的方向
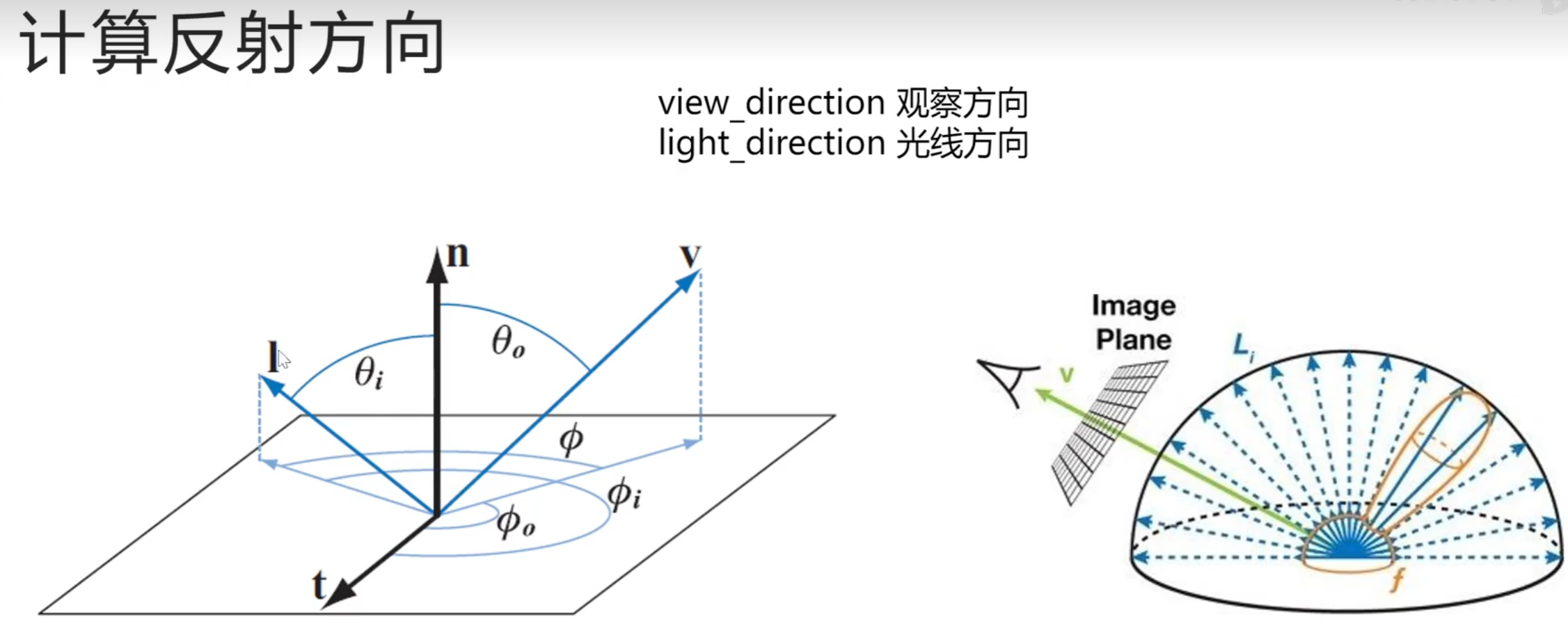
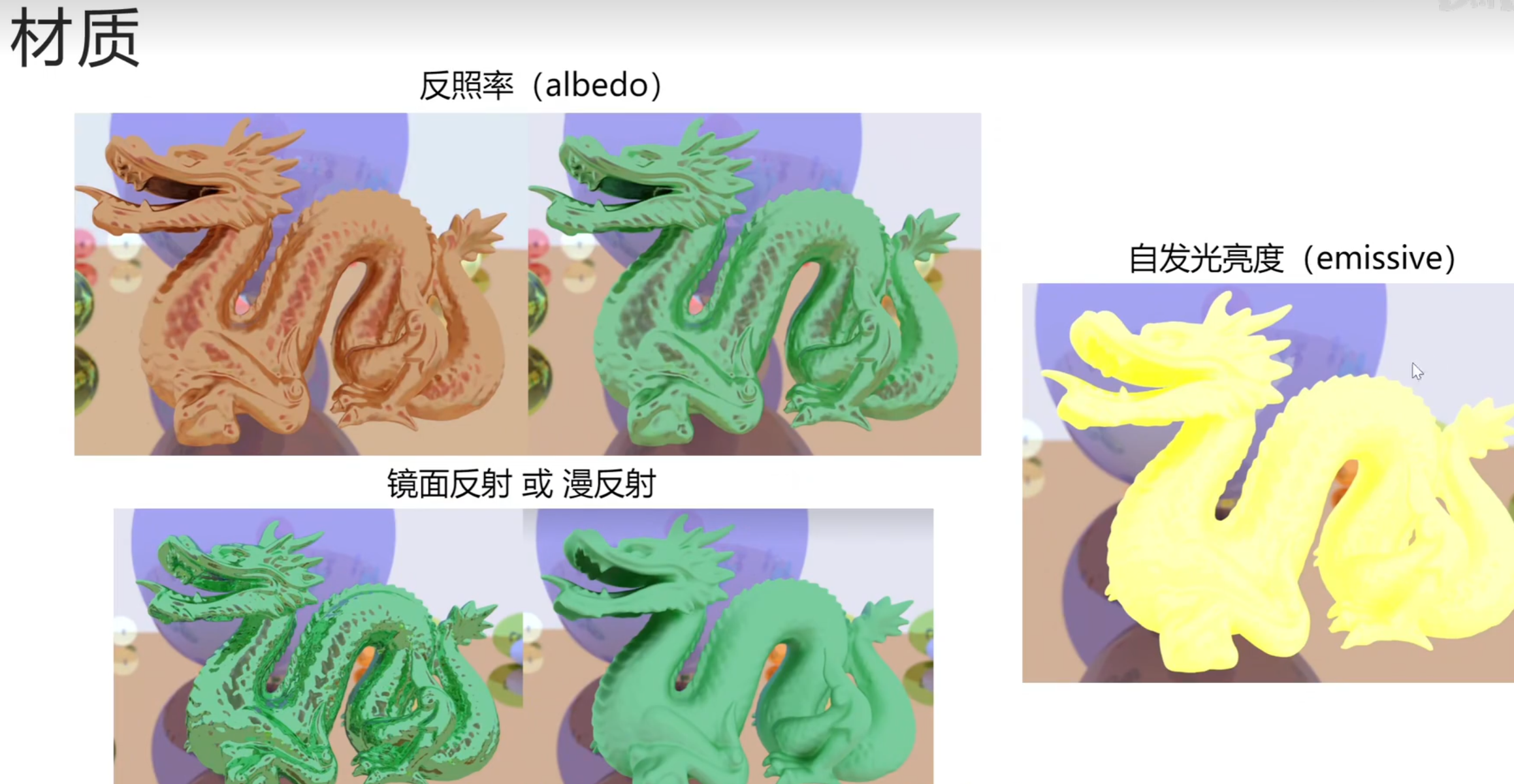
镜面反射:x,z取反
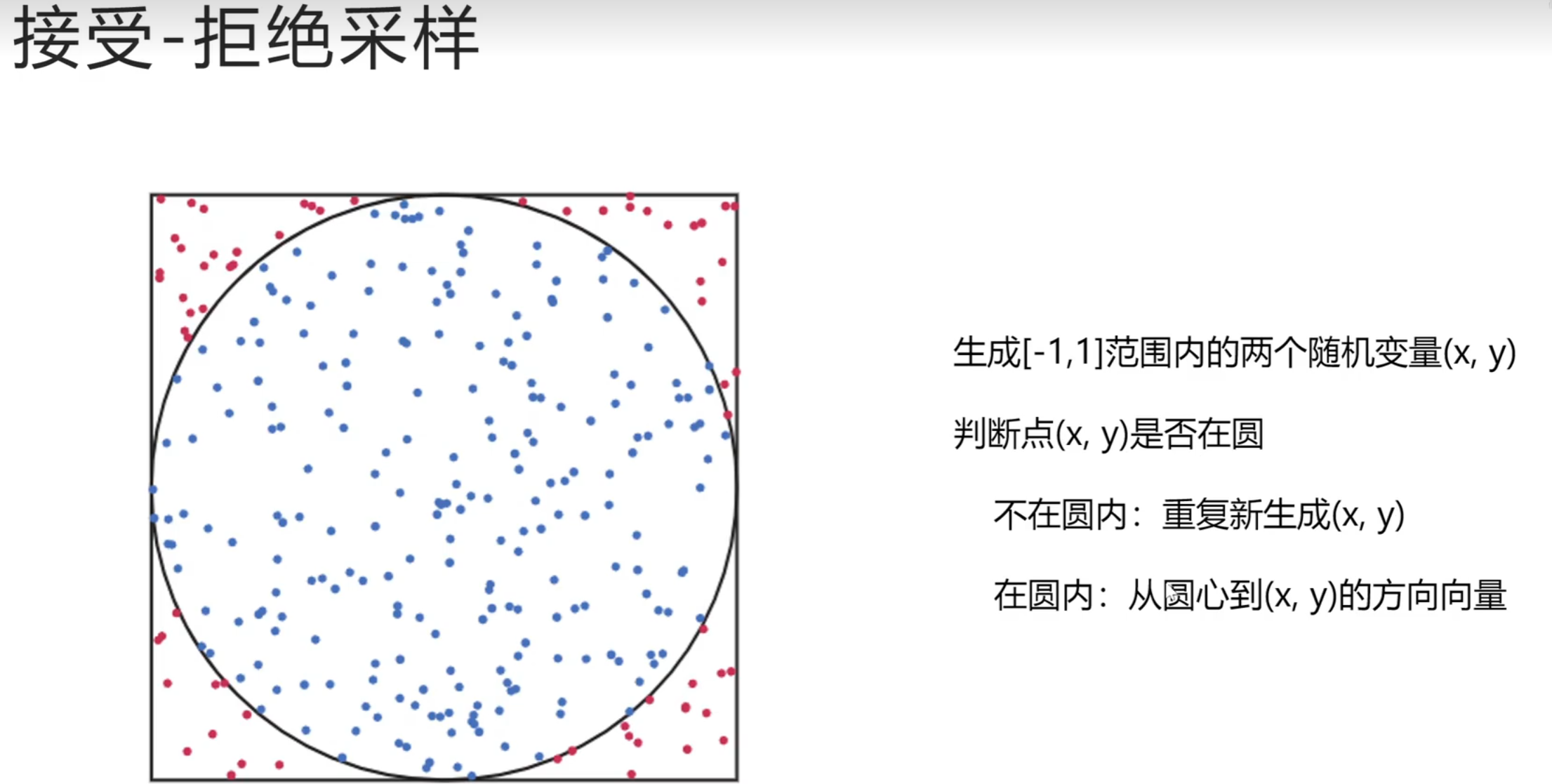
漫反射:采样
for (size_t i = 0; i < shapeInstances.size(); i++) {
auto shapeInstance = shapeInstances[i];
auto ray_object = ray.rayObjectFromWorld(shapeInstance.object_from_world);
hitInfo = shapeInstance.shape.intersect(ray_object, t_min, t_max); // 需要把世界空间下的光线转换成对象空间里相交测试
if (hitInfo.has_value()) {
t_max = hitInfo->distance;
closest_hitInfo = hitInfo;
closest_instance = &shapeInstance;
}
}
与:
for (size_t i = 0; i < shapeInstances.size(); i++) {
auto ray_object = ray.rayObjectFromWorld(shapeInstances[i].object_from_world);
hitInfo = shapeInstances[i].shape.intersect(ray_object, t_min, t_max); //需要把世界空间下的光线转换成对象空间里相交测试
if (hitInfo.has_value()) {
t_max = hitInfo->distance;
closest_hitInfo = hitInfo;
closest_instance = &shapeInstances[i];
}
}
看似一样,实则不一样
第一个是拷贝,
shapeInstance 就是一个独立的对象,它与原始 shapeInstances[i] 没有直接关系
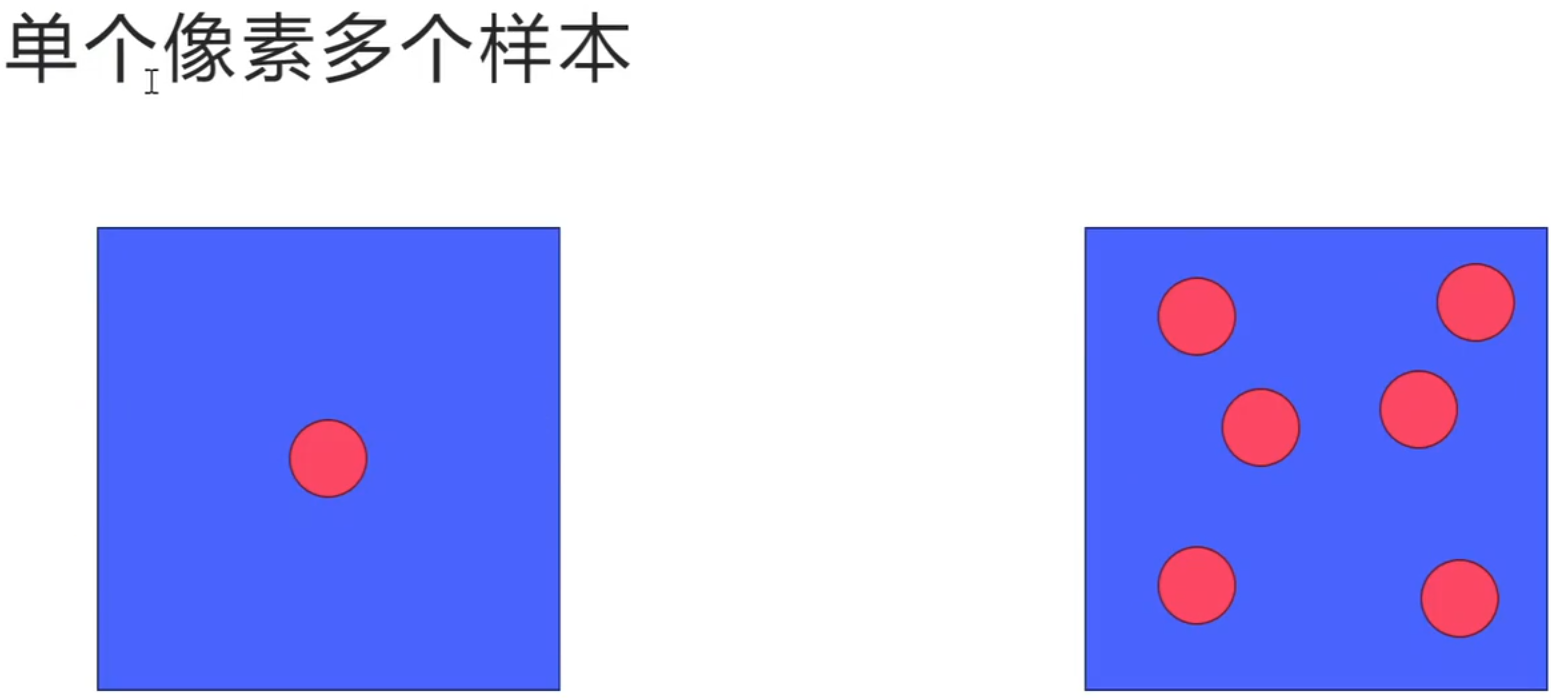
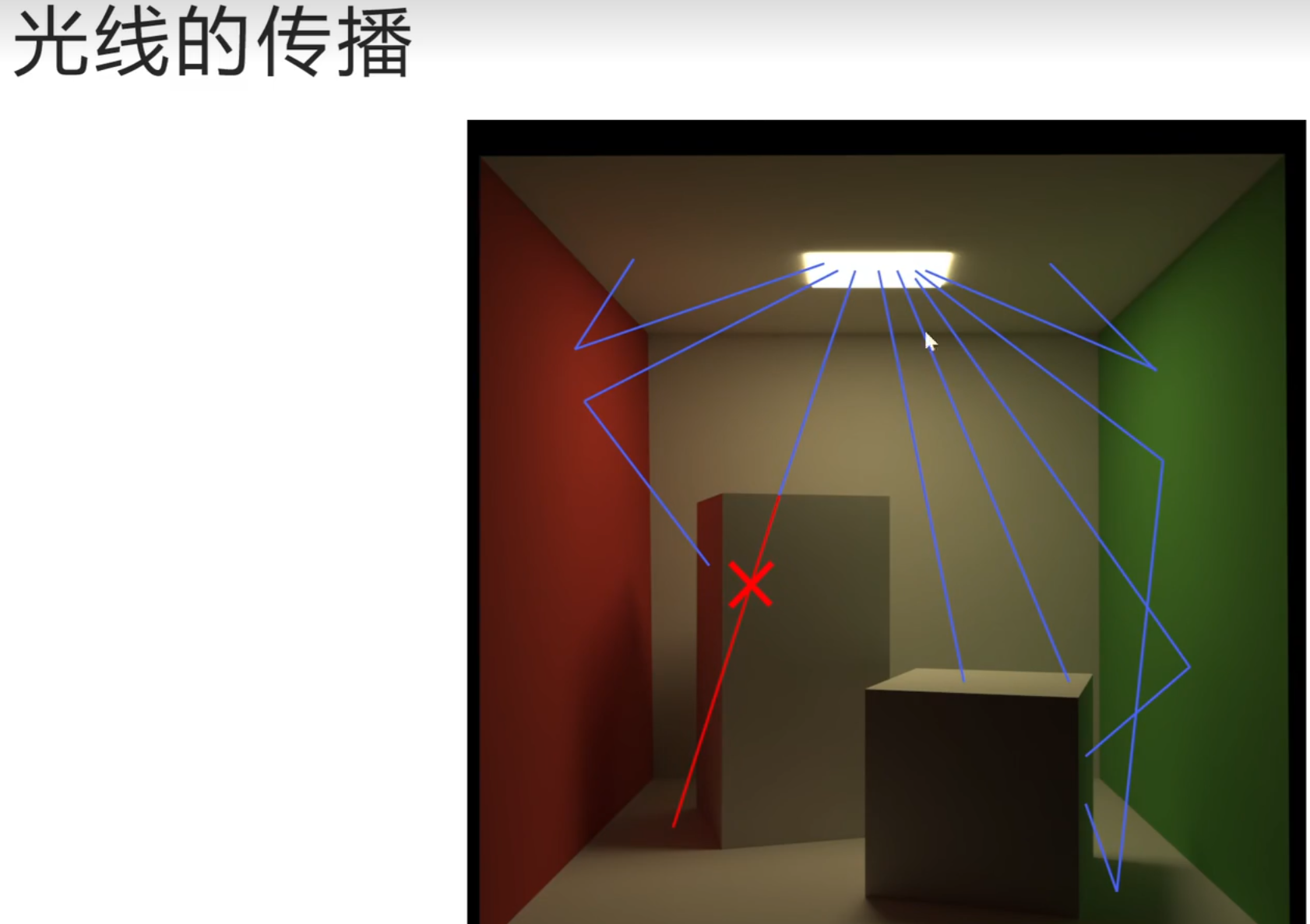
减小光追的噪点: