可以看出,我们只需要像步进电机那样不断的重复这六部换向就可以让BLDC转动起来,甚至会产生一种错觉,是不是我们换向越快电机转的越快呢?答案是:否,这里我们一定要认识到,是当转子处于特定位置时才去触发换向操作,换向是被动换向,想要提高转速一定是要提高电流,让定子产生的磁场更强,让转子更快的达到目标点然后触发换向
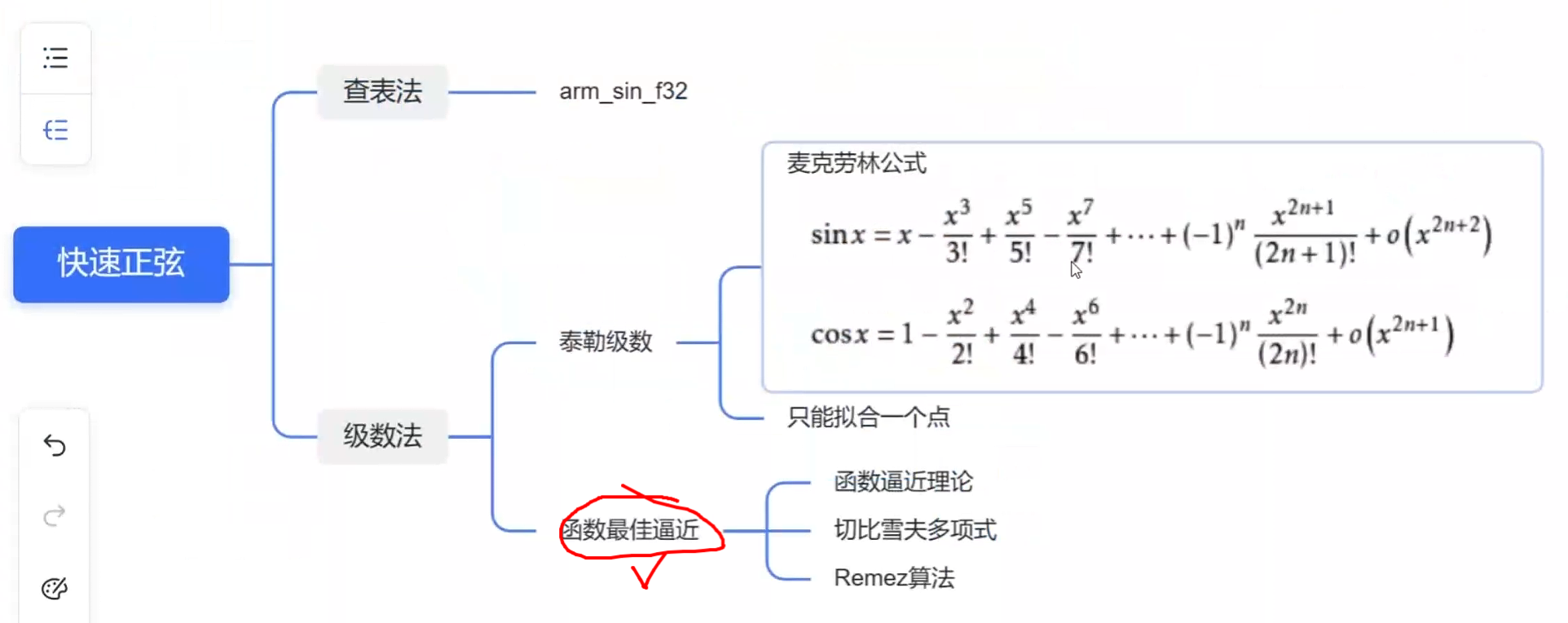
如何获得转子角度?
我们已经知道了要先检测角度再去换向,那么如何检测当前角度呢?,有以下三种方式。
1.通过安装编码器来计算出当前角度。
2.通过安装霍尔元件计算当前角度。
3.通过检测电流来计算当前角度
编码器方式获取电机当前角度
编码器方式分为两种,增量式编码器和绝对式编码器。
增量式编码器:
每次启动之气都需要做一次校准,而且为了防止单片机性能问题导致脉冲丢失,还需要对编码器每圈校准一次。因此经常使用ABZ三轴编码器,AB输出正交信号,Z轴输出中断。
绝对式编码器:
只需要在出厂之前做一次校准,之后如果没有拆机便不需要校准,通讯方式一般是SPI和IIC,需要考虑通讯时间对系统的影响。
为什么要对编码器进行校准?
因为我们无法保证在安装的时候让编码器的0°(机械角度)刚好对应电机绕组的0°(电气角度)

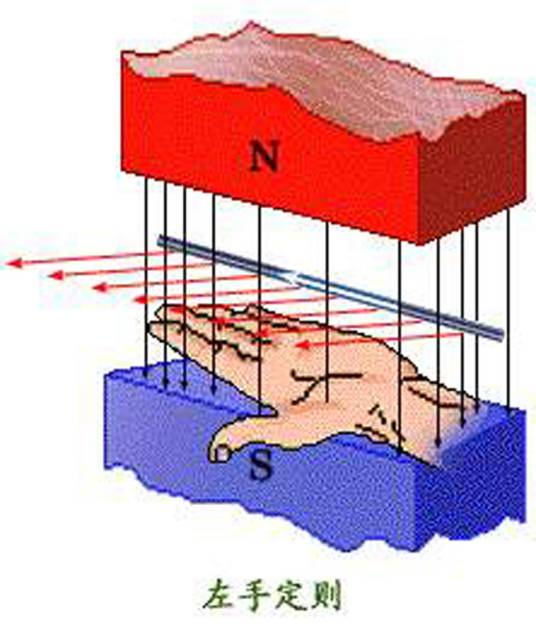
伸开左手,使拇指与其他四指垂直且在一个平面内,让磁感线从手心流入,四指指向电流方向,大拇指指向的就是安培力方向(即导体受力方向)
右手平展,使大拇指与其余四指垂直,并且都跟手掌在一个平面内。把右手放入磁场中,让磁感线从掌心进入(当磁感线为直线时,相当于手心面向N极),大拇指指向导线运动方向,则四指所指方向为导线中感应电流(动生电动势)的方向。
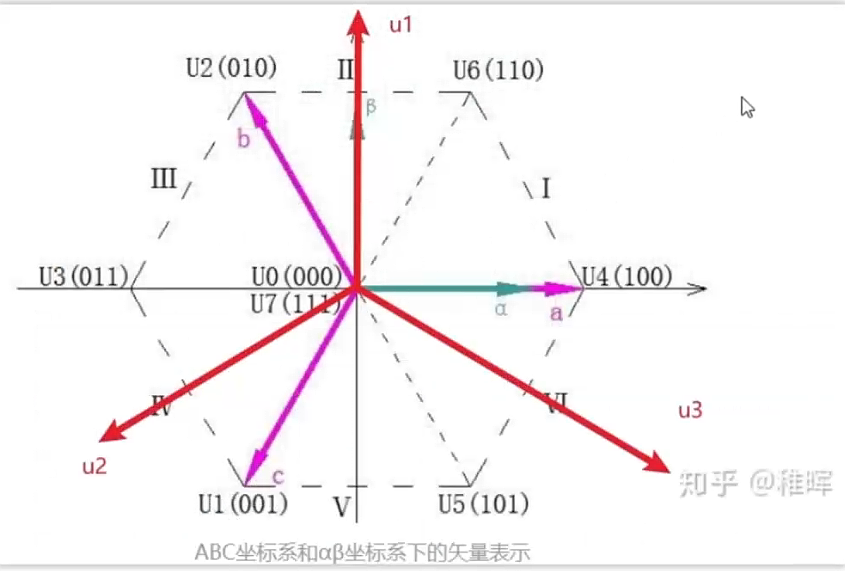
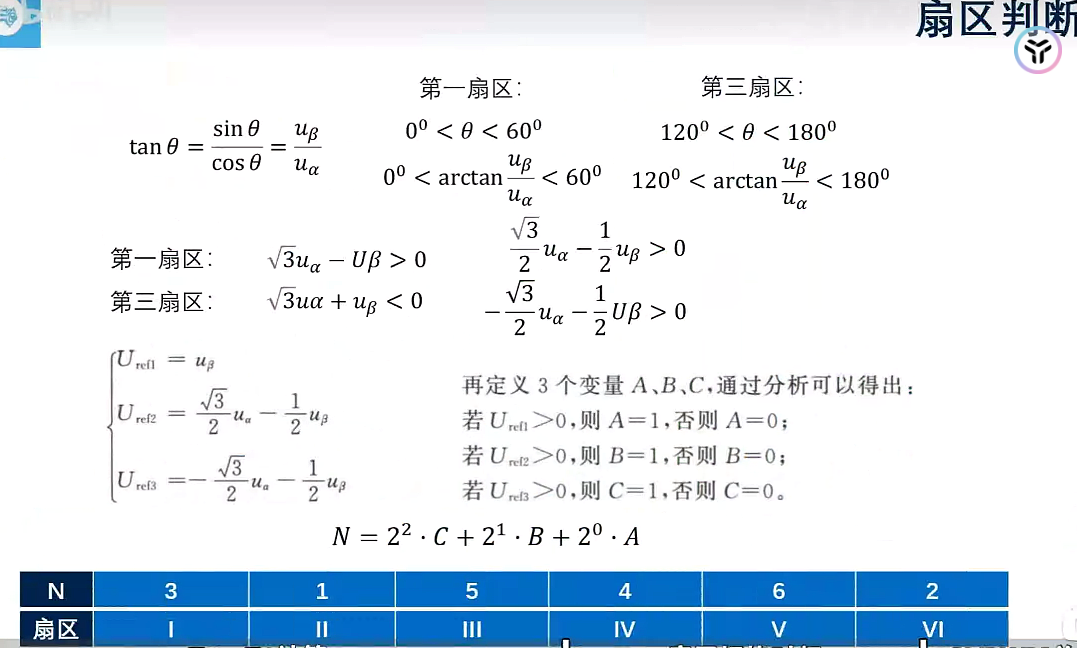
根据想得到的电流矢量到u1,u2,u3上投影的正负,来判断在哪个扇区里,u1,u2,u3可由u_alpha,u_beta表示出

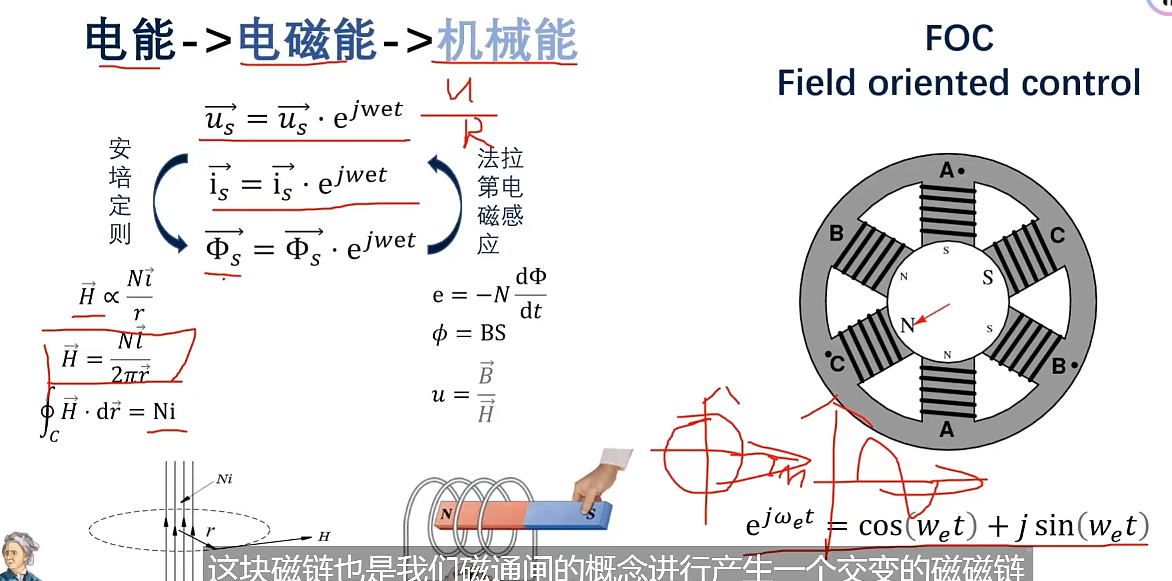
从定子来计算
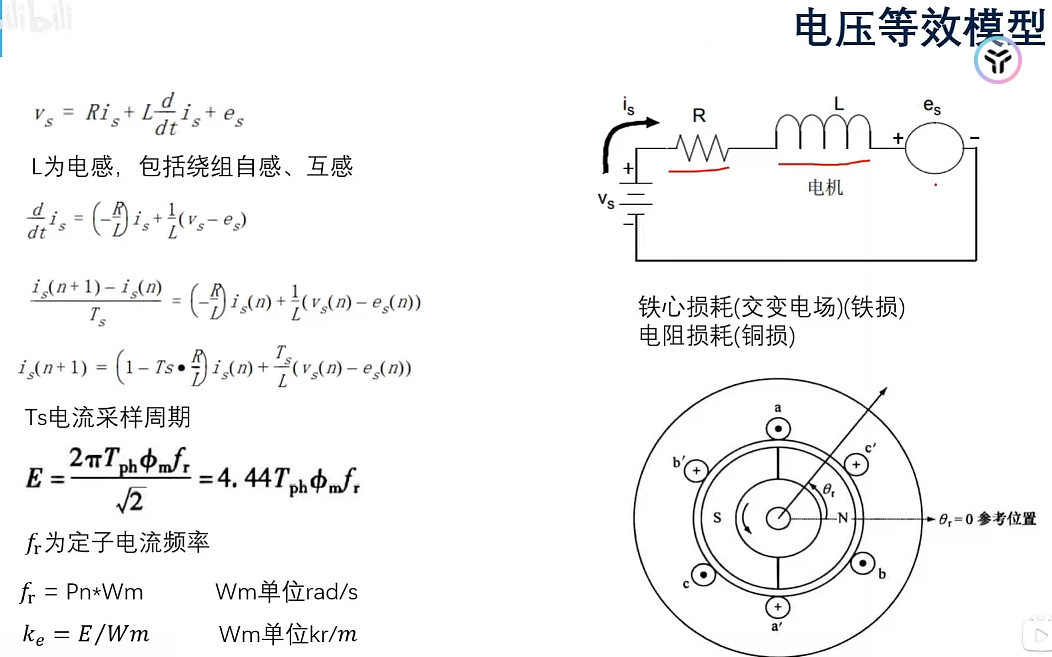 可以计算出反电动势,进而计算转子的速度和位置(无感)
可以计算出反电动势,进而计算转子的速度和位置(无感)
当变压器的初级绕组通电后,线圈所产生的磁通在铁心流动,因为铁心本身也是导体(由硅钢片制成),在垂直于磁力线的平面上就会感应电势,这个电势在铁心的断面上形成闭合回路并产生电流,好象一个旋涡所以称为“涡流”。这个“涡流”使变压器的损耗增加,并且使变压器的铁心发热变压器的温升增加。由“涡流”所产生的损耗我们称为“铁损”。
另外要绕制变压器需要用大量的铜线,这些铜导线存在着电阻,电流流过时这电阻会消耗一定的功率,这部分损耗往往变成热量而消耗,我们称这种损耗为“铜损”。
铁损等于铜损时,变压器效率最高。大概就是变压器额定负荷的0.65倍左右。
从绕组来计算(d,q,轴的电压方程)
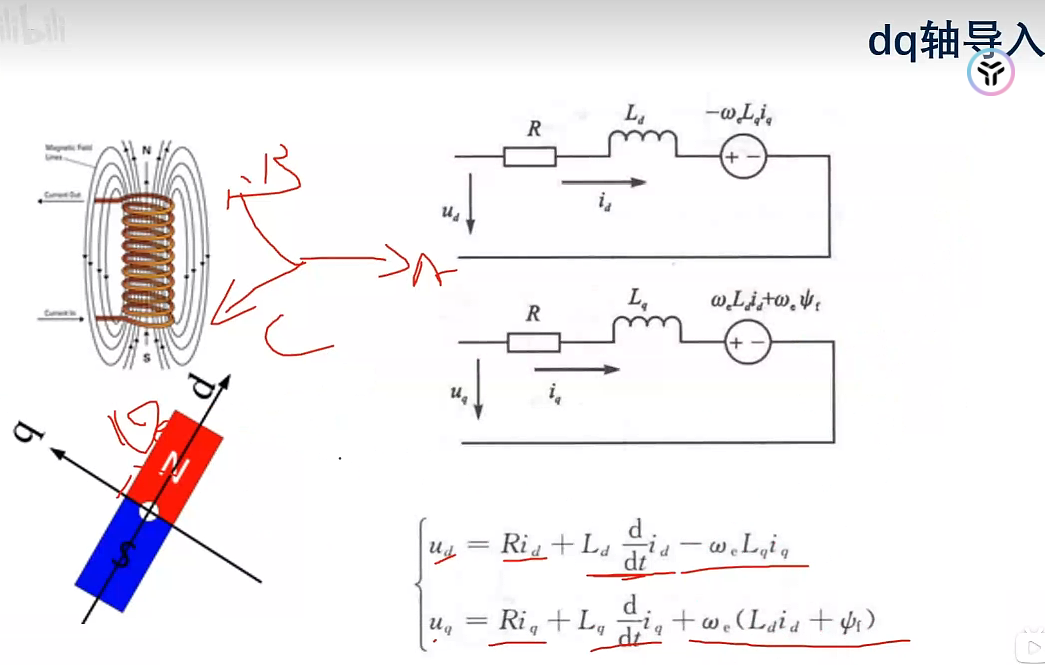
由于定子自感的属性,电流会滞后电压90度
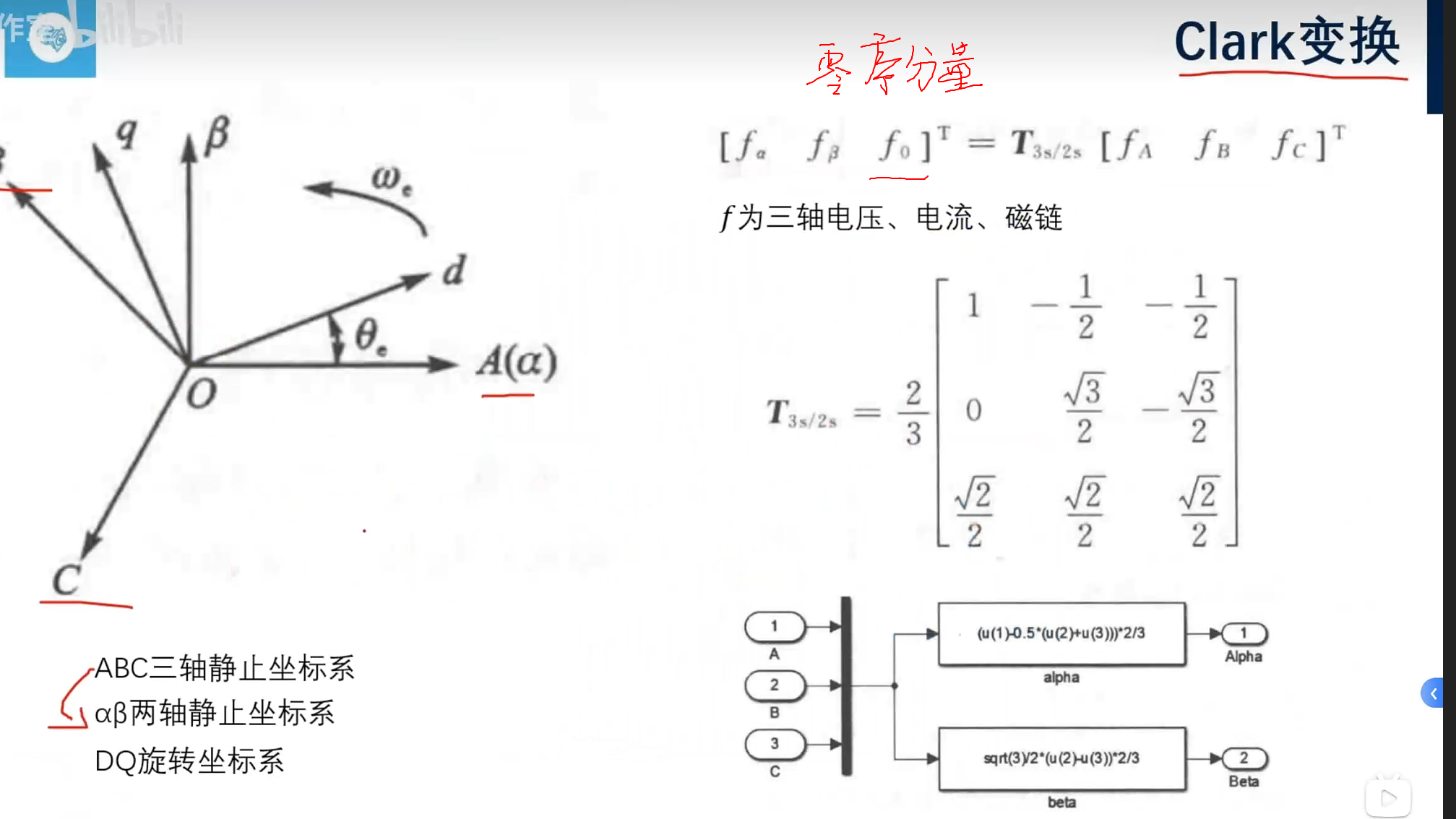
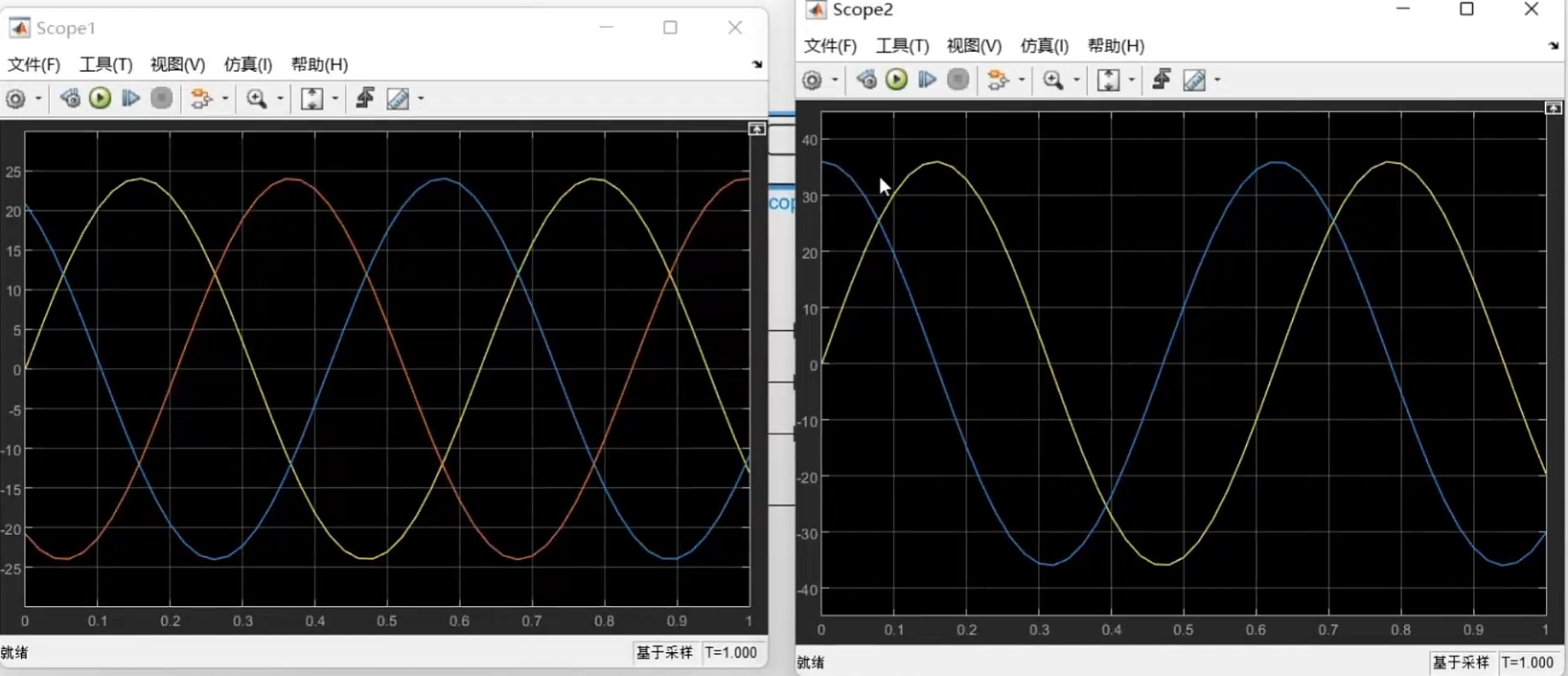
要等幅变换,所以要乘(2/3)
如果遇到乘(根号下2/3),是等功率变换
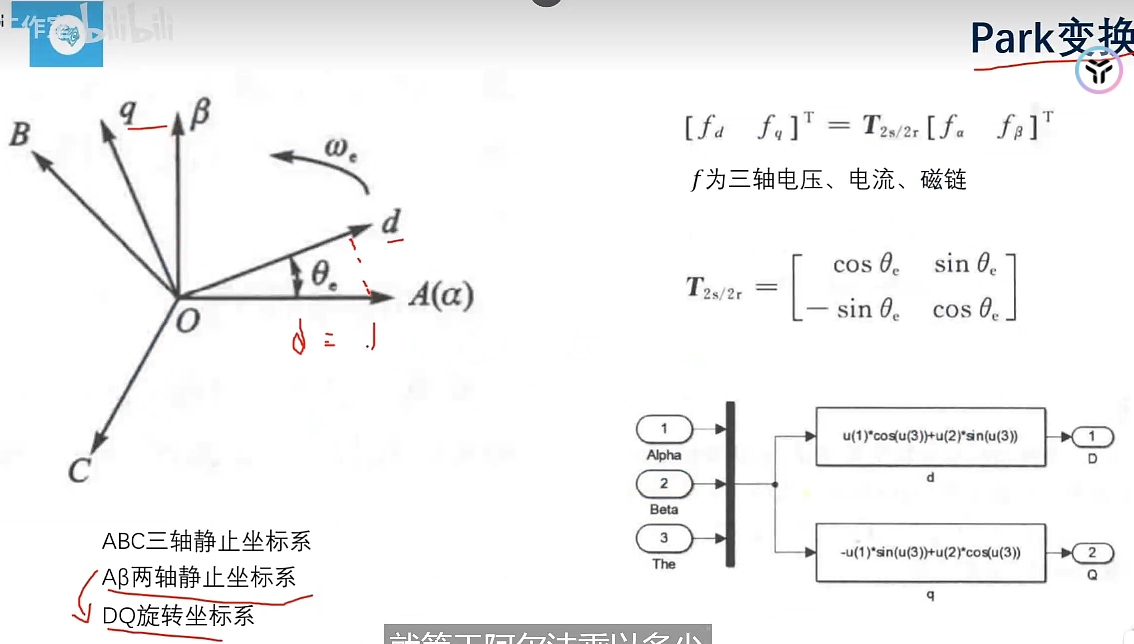


反帕克变换就是对帕克变换旋转矩阵求逆
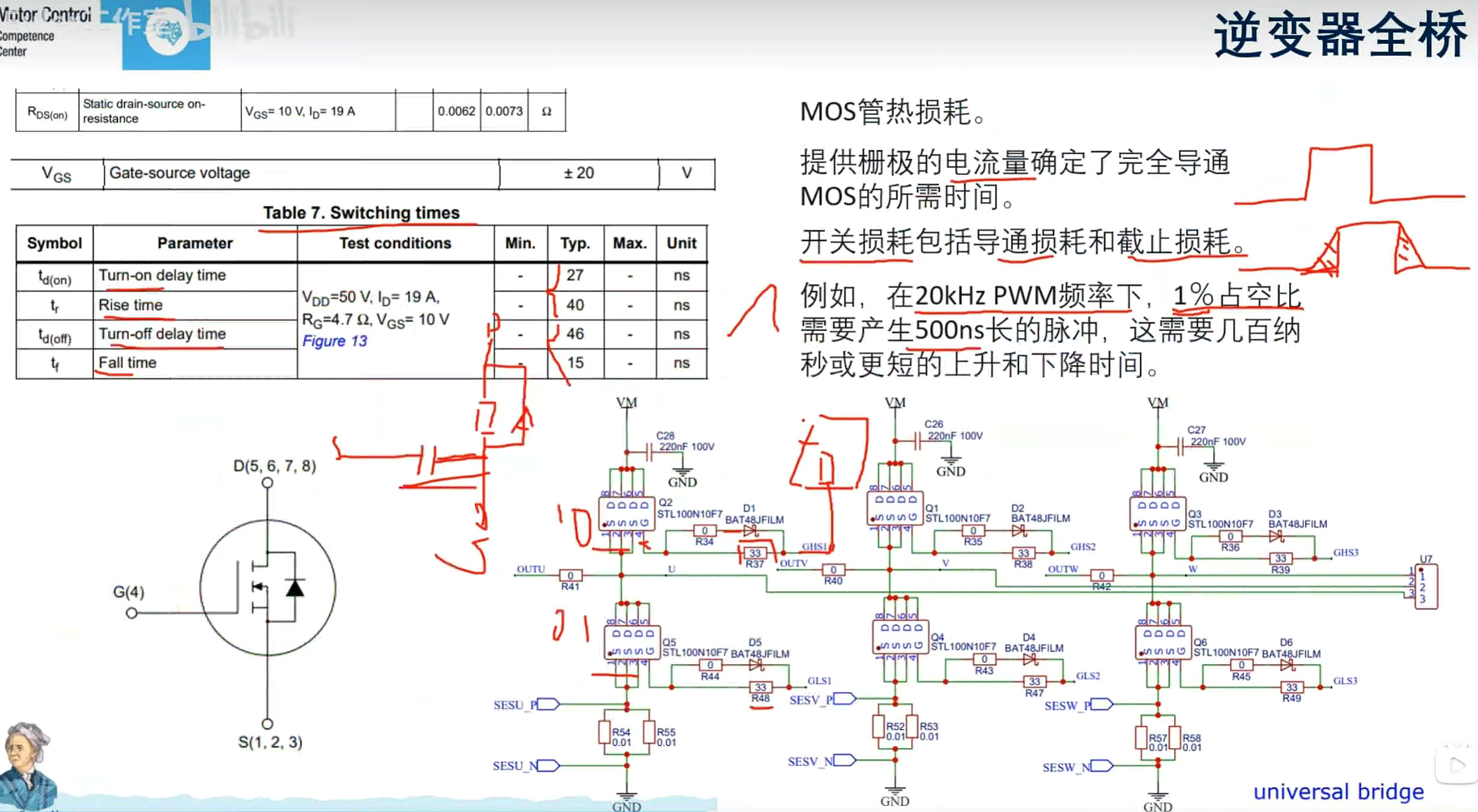
MOS管是电压驱动型,三极管是电流驱动型
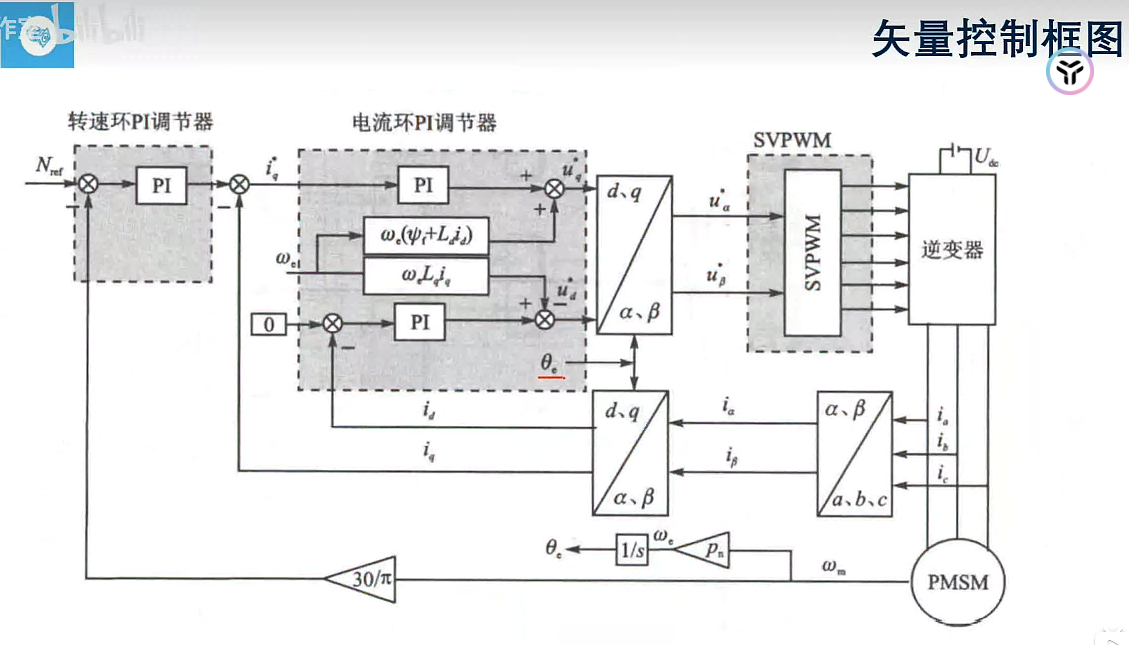
电角度=极对数(或者级数/2)*机械角度